Retas paralelas aos planos e aos eixos coordenados
Considerando uma componente do vetor diretor igual à zero, que é representado pelo vetor
v = (a, b, c) obteremos o vetor
v ortogonal a um dos eixos coordenados, sendo então a reta r (determinada por um ponto A( x1, y1, z1)) paralela ao plano dos outros eixos. Portanto se: a = 0, v = (0,b,c), logo, é é perpendicular ao eixo "ox" e paralelo ao eixo "yoz".
As equações da reta r ficam:
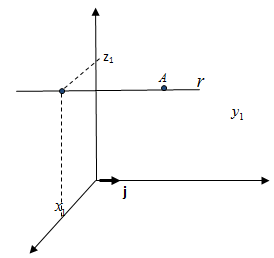
Verificamos que a coordenada x permanece constante, variando somente entre y e z. Com isso averiguamos que a reta r se localiza num plano paralelo ao plano coordenado yOz. Como exemplo temos a ilustração abaixo:
Ilustração 1: Demonstração de plano paralelo ao plano coordenado yOz
Fonte: Retirado de (1)
Caso a componente b do vetor diretor venha ser nulo obteremos: b = 0, v = (a,0,c), logo, é perpendicular ao eixo "oy" e paralelo ao eixo "xoz".
As equações da reta ficam:
Verificamos que a coordenada y permanece constante, variando somente entre x e z. Com isso averiguamos que a reta r se localiza num plano paralelo ao plano coordenado xOz.
Ilustração 2: Demonstração de plano paralelo ao plano coordenado xOz
Fonte: Retirado de 1
Caso a componente c do vetor diretor venha ser nulo: c = 0, v = (a,b,0), logo, é perpendicular ao eixo "oz" e paralelo ao eixo "xoy".
As equações da reta ficam:
Verificamos que a coordenada z permanece constante, variando somente entre x e y. Com isso averiguamos que a reta r se localiza num plano paralelo ao plano coordenado xOy.
Ilustração 3: Demonstração de plano paralelo ao plano coordenado xOy
Fonte: Retirado de (1)
Agora verificaremos quando duas das componentes de v são nulas.
Caso as componentes ‘a’ e ‘b’ do vetor diretor forem nulos: v = (0,0,c)
As equações da reta ficam:
Verificamos que a coordenada z é variável.
Ilustração 4: Demonstração de coordenada z é variável
Fonte: Retirado de 1
Caso os componentes ‘a’ e ‘c’ do vetor diretor forem nulos: v = (0,b,0)
As equações da reta ficam:
Verificamos que a coordenada y é variável.
Ilustração 5: Demonstração de coordenada y é variável
Fonte: Retirado de 1
Caso os componentes ‘b’ e ‘c’ do vetor diretor forem nulos: v = (a,0,0)
As equações da reta ficam:
Verificamos que a coordenada x é variável.
Ilustração 6: Demonstração de coordenada x é variável
Fonte: Retirado de 1
Exemplo:
Determinar as equações da reta que passa pelo ponto A (-2, 3, -2) e tem a direção do vetor
v = 3i + 2k.
Resolução:
Com base na equação do vetor (3i + 2k) verificamos que as componentes do vetor v são: a = 3; b = 0 e c = 2. Como a componente b é nula, verificamos que a reta se encontra num plano paralelo ao xOz, com as seguintes equações:
Referências:
http://www.matematica.pucminas.br/profs/web_fabiano/calculo1/lineares.pdf
http://www.pucrs.br/famat/augusto/alga/Alga0402.pdf
1 STEINBRUCH, Alfredo; WINTERLE, Paulo. Geometria Analítica. São Paulo: Pearson Makron Books, 1987;
2 Retas. Disponível http://www.pucrs.br/famat/augusto/alga/Alga0402.pdf
Observações: os vetores estão representados em negrito.